
Posibles problemas y sus soluciones
En la puesta en marcha del ROV, hay que hacer muchas verificaciones del funcionamiento del ROV. En este caso, se va a ver los posibles problemas que pueden surgir al comprobar el funcionamiento de los motores con el mando.
Para asegurar el funcionamiento, hay que comprobar que los motores se activen y que además respondan a los movimientos marcados por el mando. Pueden surgir tres problemas.
- Problemas en la selección de la estructura de los motores
- El mando está dañado o hay errores en la configuración
- ESC o motores dañados, o mala conexión del circuito
- Problemas en la selección de la estructura de los motores
Hay que asegurarse que en el QGrounControl selecciones la estructura montada en tu ROV, si no, el software va a realizar lecturas erróneas de los motores y va a hacer movimientos que no concuerdan con la estructura. En nuestro caso tenemos una estructura de seis motores vectorizada.
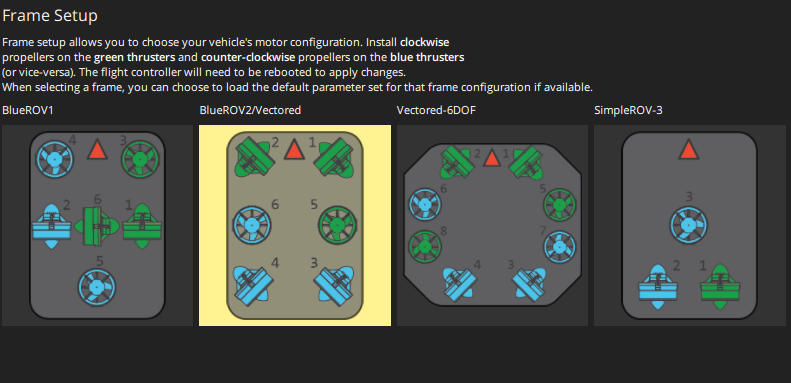
Para solucionarlo, en QGroundControl dentro de la pestaña de «Frame» seleccionaremos la estructura montada. Además, las hélices de cada motor deben estar colocadas como se muestra en la imagen. Los motores en color azul tiene hélices horarias (positivas) y los motores en color verde tienen hélices anti-horarias (negativas). Si todavía tienes problemas con el movimiento de los motores, entonces desde la pestaña de «Motors» se pueden hacer comprobaciones individuales de los motores.
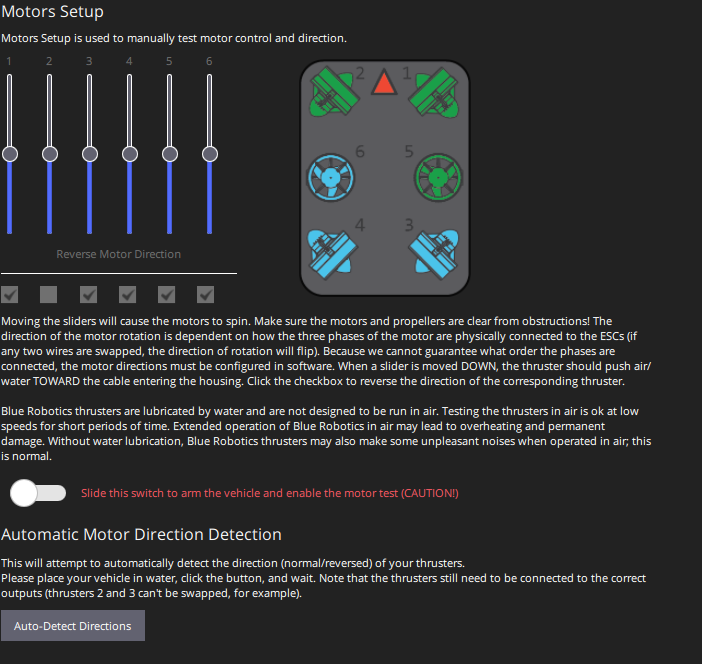
Desde esta pestaña, al armar el ROV desde el botón deslizable para armar el robot, podremos mover cada motor individualmente. Así, podrás asegurarte que los motores giran en el sentido adecuado. Si no lo hacen o se mueven al contrario de lo deseado, entonces hay que invertir el movimiento del motor clicando el cuadrado que se ubica debajo de cada motor.
En nuestro caso, nos pasaba que al meterlo en el agua realizaba algunos movimientos correctamente pero nunca conseguíamos que se moviera recto (es decir, hacia adelante o hacia atrás). Para encontrar el fallo hicimos unas comprobaciones con unos papeles fuera del agua. Por ejemplo, si queremos mover el robot hacia adelante los cuatro motores de las esquinas tienen que desplazar el agua hacia atrás y colocando los papeles detrás de estos motores y activándolos hay que observar que los papeles se desplazan hacia atrás. Pues vimos, que el motor 2 estaba mal configurado y al invertir el funcionamiento, conseguimos solucionar el problema y el robot ya se movía correctamente dentro y fuera del agua.
2. El mando está dañado o hay errores en la configuración
Otra opción puede ser que el mando esté dañado. Para comprobar su funcionamiento, primero se va a revisar la lectura del mando desde el ordenador. En windows, poniendo en el buscador «dispositivos de juego», saldrá una ventana con el mando conectado, clicando en propiedades, hay que comprobar que todos los botones y joysticks funcionan correctamente.
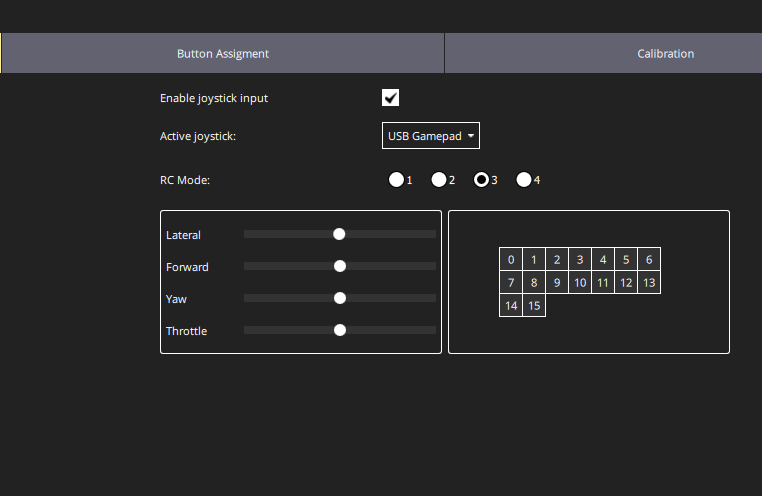
En el segundo paso, hay que realizar la misma comprobación pero en Ardusub, dentro de la pestaña de «Joystick», donde, se va a realizar una comprobación similar a la anterior (se recomienda realizar una calibración en esta pestaña). Por último, asegurarse de que los botones estén configurados como se desea y que los joysticks realizan los movimientos que se desean, de todos modos, estos movimientos se pueden cambiar con los «RC MODE» del 1-4.
3. ESC o motores dañados, o mala conexión del circuito
Si ninguno de los anteriores pasos ha solucionado el problema, es posible que alguno de los motores se haya dañado o que el propio ESC se haya dañado. Para ello, hay que realizar las comprobaciones individuales de cada ESC (circuito mostrado en el blog de «Conexiones a realizar para comprobar el funcionamiento individual de todos los componentes del ROV«) .