
Conexiones necesarias y material necesario para verificarlo
Aquí vamos a mostrar los circuitos necesarios para la comprobación del rendimiento de los motores, ESC, brazo robótico, luces, pixhawk, raspberry PI 3 Model B, módulo de potencia, módulo de comunicaciones, cámara + servomotor y sensor de profundidad (componentes usados en nuestro robot submarino).
Motores y ESC
Material necesario: CCPM Servo Consistency Master (tester de servos y ESC), alimentación de 5V, alimentación ESC mediante la batería.
Primero, hay que conectar una alimentación de 4,8-6V al tester, nosotros hemos utilizado un cable USB-A desde el ordenador. Después, conectar la señal del ESC a la salida del tester (cable blanco a la S y cable negro a -). Conectar los tres cables del motor al ESC (fases A, B, C). Por último, alimentar el ESC mediante una batería.

Una vez conectados todos los componentes, al girar el potenciómetro que hay incluido en el tester, el motor debería girar. Si no es así, comprobar que el ESC y la batería sean las adecuadas para el motor.
Brazo robótico
Material necesario: batería, pixhawk, power module o módulo de potencia, USB-A a micro USB.
Primero, conectar el USB-A al ordenador y el micro USB a la pixhawk. Después, conectar la alimentación de la pixhawk al power module (o al módulo de potencia). Luego, conectar los cables de alimentación del brazo al power module (o al módulo de potencia). Por último, conectar el cable de señal a la pixhawk (AUX OUT) y conectar la batería.
Una vez realizadas todas las conexiones, mediante QGroundControl y un mando previamente configurado, se comprueba su funcionamiento.
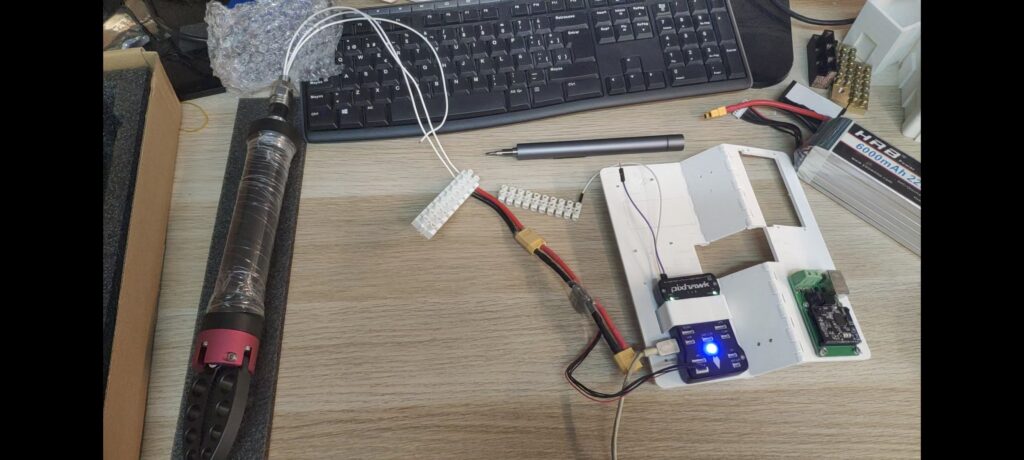
Luces
Material necesario: Batería, un par de regletas y la luz.
Conectamos el positivo de la luz y el cable de señal al mismo pin de la regleta y el negativo a otro. Después, conectamos el positivo y negativo de la batería a sus correspondientes regletas.
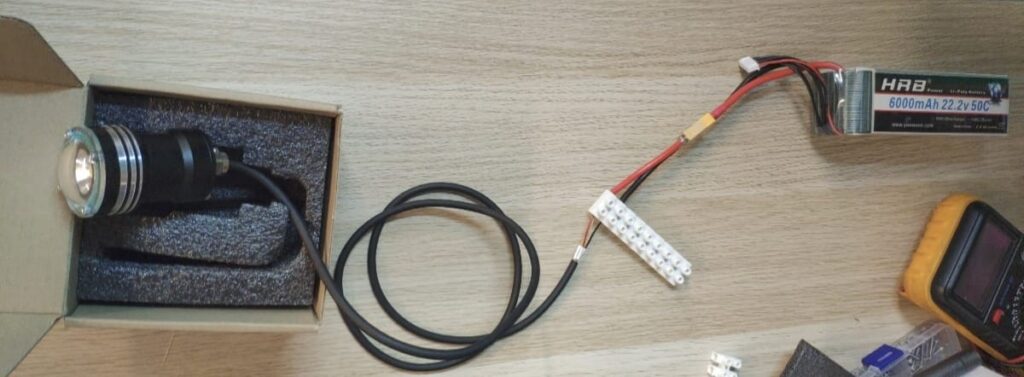
Al conectar el cable de la señal con el positivo la luz tiene que encenderse.
Pixhawk, raspberry, módulo de potencia y módulo de comunicaciones
Materia necesario: Pixhawk, raspberry Pi 3 Model B, módulo de potencia, módulo de comunicaciones, batería, cables dupont, cable de alimentación pixhawk (6pines), conectores XT60, regleta.
Primero conectar un conector XT60 desde el módulo de potencia a una regleta. Desde el módulo de potencia conectar la pixhawk mediante el conector de 6 pines al «Power», conectar con los cables dupont desde la salida de 5V a los pines 4 (+) y 6 (GND) de la raspberry, conectar con cables desde la salida de 12V a la alimentación del módulo de comunicaciones. Luego, con un cable pequeño conectar los pines 5 y 6 del módulo de potencia. Por último, conectar la batería a la regleta.
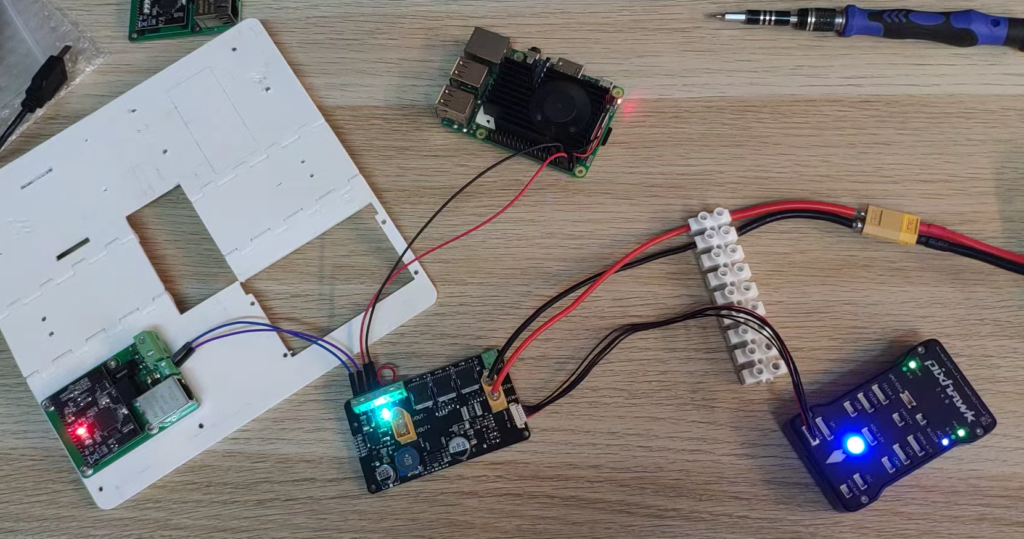
Al realizar estas conexiones confirmamos que todos los componentes funcionan correctamente.
Cámara + servomotor
Material necesario: cámara USB, servomotor, CCPM Servo Consistency Master y un ordenador.
La comprobación del funcionamiento de estos componentes es muy sencilla y rápida. La cámara se puede conectar al ordenador mediante el cable USB-A y desde la aplicación de cámara de Windows, tiene que detectar la cámara y tener imagen.
Para el servomotor, alimentando el servo tester con 5V, se conectan los pines positivo y negativo en la salida del tester y comprobar moviendo el potenciómetro.
Sensor de profundidad
Material necesario: sensor de profundidad, pixhawk, raspberry, módulo de potencia, batería, QGrounControl.
Con el circuito realizado anteriormente para la Pixhawk, raspberry Pi 3 Model B, módulo de potencia, módulo de comunicaciones (no es necesario conectar el módulo de comunicaciones), se va a alimentar la pixhawk desde otro cable micro usb conectada en uno de los laterales, a la raspberry con USB-A. Mediante un cable ethernet conectar la raspberry al ordenador y configurar la dirección IP del ordenador para poder recibir información del circuito. Después, conectar el sensor de profundidad en la entrada I2C de la pixhawk.
Una vez realizadas todas las conexiones y ver que el QGroundControl detecta el circuito, en la configuración del vehículo en la pestaña de «sensor setup», pulsar el botón de «pressure» y ver que la configuración es completada de forma correcta.